Robotino
merupakan platform robot industri produksi FESTO yang memungkinkan untuk
dikembangkan dengan menambah unsur mekanik maupun elektronik (sensor
atau motor).Berdasarkan spesifikasi yang dikeluarkan oleh Festo
didactic, Power supply pada robot ini menggunakan dua buah battery 12 V
yang mampu digunakan sampai 2 jam. Konsep gerak robot mengggunakan
metode steering 3 wheels omni-directional dengan 3 buah motor
DC 3600 rpm yang dilengkapi dengan Planetary gear serta toothed belt,
sehingga total transmisinya 16:1. Sensor putaran menggunakan Incremental
encoder dengan resolusi 2048 setiap motor per satu putaran. Guna
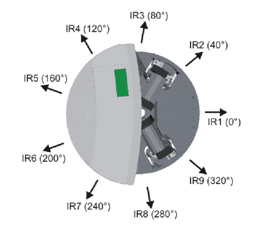
mendeteksi obyek, robotino dilengkapi 9 buah sensor Optical Range Finder tipe GP2D120 keluaran SHARP, dimana antar sensor membentuk sudut 40˚ serta webcam sebagai vision sensor. Semua device ini akan terhubung dengan Main Controller.
 |
 |
Guna mendukung akses pheriperal eksternal maupun internal, robotino dilengkapi dengan card I/O EA09 board. Komunikasi antara EA09 dengan main controller menggunakan serial RS232.


Penggerak (actuator)
Robotino ini terdiri dari 3 buah motor DC yang masing-maing dihubungkan dengan
sebuah roda omni-directional. Proses
pengendalian 3 buah motor DC ini dilakukan secara terpisah, sehingga parameter
kecepatan dapat diatur berbeda pada tiap-tiap motor. Setiap penggerak pada Robotino
ini memiliki, motor DC, gear unit dengan
ratio 16:1, all-way roller, toothed belt dan incremental
encoder. Posisi dari roda omni-directional terhadap chasis
Robotino ini, masing-masing mempunyai sudut 120º.
Roda Omni-directional adalah suatu roda unik karena memiliki kemampuan
bergerak bebas dua arah. Roda ini berputar seperti roda pada umumnya serta
mampu bergeser kesamping menggunakan roda di sepanjang lingkar luar roda. Roda Omni-directional memungkinkan robot
untuk mengkonversi dari robot non-holonomic
ke bentuk robot holonomic. Robot omni-directional
holonomic mampu bergerak ke segala arah tanpa mengubah arah roda. Roda omni-directional holonomic dapat
bergerak maju mundur, geser ke samping, dan berputar pada posisi tetap karena
memiliki 3 DOF (Degree of Freedom).
Kemampuan ini memungkinkan robot yang menggunakan roda omni-directional mampu bermanuver untuk lebih lincah dan lebih
efisien.


Dalam menentukan persamaan kinematik untuk 3 wheels omni-directional adalah bahwa
lingkungan tempat robot berjalan pada gobal
frame dapat ditentukan dengan koordinat Cartesian [x,y], sedangkan untuk
lokasi robot pada global frame dapat
direpresentasikan sebagai (x,y,θ) yang memiliki kecepatan (vx,vy,ω). Sudut antar
roda omni-directional direpresentasikan
sebagai αi(i=1,2,3) dan masing-masing
nilainya adalah α1=0º, α2=120º, α3=240º. R merupakan jarak roda ke titik tengah
robot dan r adalah jari-jari roda. Berdasarkan gambar 1.6, kecepatan angular
masing-masing roda (Ø1, Ø2, Ø3) dapat dinyatakan seperti persamaan dibawah ini :

No comments:
Post a Comment